感知系统¶
感知系统不仅包括视觉感知,还可以包含触觉、声音等。在未知环境中,机器人想实现自主移动和导航必须知道自己在哪(通过相机重定位 [Ding et al., 2019]),周围什么情况(通过3D物体检测 [Yi et al., 2020]或语义分割),预测相机在空间的轨迹 [Qiu et al., 2022],这些要依靠感知系统来实现 [Xu et al., 2019]。 一提到感知系统,不得不提的就是即时定位与建图(Simultaneous Localization and Mapping,SLAM)系统。SLAM大致过程包括地标提取、数据关联、状态估计、状态更新以及地标更新等。视觉里程计Visual Odometry是SLAM中的重要部分,它估计两个时刻机器人的相对运动(Ego-motion)。ORB-SLAM系列是视觉SLAM中有代表性的工作, 图17.1.3 展示了最新的ORB-SLAM3的主要系统组件。香港科技大学开源的基于单目视觉与惯导融合的SLAM技术VINS-Mono也很值得关注。多传感器融合、优化数据关联与回环检测、与前端异构处理器集成、提升鲁棒性和重定位精度都是SLAM技术接下来的发展方向。
最近,随着机器学习的兴起,基于学习的SLAM框架也被提了出来。TartanVO是第一个基于学习的视觉里程计(VO)模型,该模型可以推广到多个数据集和现实世界场景,并优于传统基于几何的方法。 UnDeepVO是一个无监督深度学习方案,能够通过使用深度神经网络估计单目相机的 6-DoF 位姿及其视图深度。DROID-SLAM是用于单目、立体和 RGB-D 相机的深度视觉 SLAM,它通过Bundle Adjustment层对相机位姿和像素深度的反复迭代更新,具有很强的鲁棒性,故障大大减少,尽管对单目视频进行了训练,但它可以利用立体声或 RGB-D 视频在测试时提高性能。其中,Bundle Adjustment (BA)与机器学习的结合被广泛研究。CMU提出通过主动神经 SLAM 的模块化系统帮助智能机器人在未知环境中的高效探索。
物体检测与语义分割¶
感知系统不仅包括视觉感知,还可以包含触觉、声音等。在未知环境中,机器人想实现自主移动和导航必须知道自己在哪(通过相机重定位 [Ding et al., 2019]),周围什么情况(通过3D物体检测 [Yi et al., 2020]或语义分割),预测相机在空间的轨迹 [Qiu et al., 2022],这些要依靠感知系统来实现 [Xu et al., 2019]。
图像语义分割作为一项常用而又经典的感知技术,经过多年不停的迭代,传统的2D技术已经渐渐的趋于成熟,提升空间较小。同时传统的2D语义分割有一定的局限性,很难从2D图像中直接获知物体的空间位置、以及其在整体空间中的布局,要知道整体空间的位置信息还是需要更多的三维信息。为了让机器人从单纯的2D图像出发,得到空间中物体三维的坐标、语义和边界信息,跨视角语义分割 [Pan et al., 2020]吸引了众多研究者的关注。
即时定位与建图(SLAM)¶
将一个机器人放到未知的环境中,如何能让它明白自己的位置和周围环境?这要靠即时定位与建图(Simultaneous Localization and Mapping,SLAM)系统来实现。
图:numref:orbslam3 展示了最新的ORB-SLAM3的主要系统组件。 SLAM大致过程包括地标提取、数据关联、状态估计、状态更新以及地标更新等。SLAM系统在机器人运动过程中通过重复观测到的地图特征(比如,墙角,柱子等)定位自身位置和姿态,再根据自身位置增量式的构建地图,从而达到同时定位和地图构建的目的。
DROID-SLAM是用于单目、立体和 RGB-D 相机的深度视觉 SLAM,它通过Bundle Adjustment层对相机位姿和像素深度的反复迭代更新,具有很强的鲁棒性,故障大大减少,尽管对单目视频进行了训练,但它可以利用立体声或 RGB-D 视频在测试时提高性能。 其中,Bundle Adjustment (BA)描述了像素坐标和重投影坐标之间误差的和,重投影坐标通常使用3D坐标点和相机参数计算得到。BA计算量较大较为耗时,爱丁堡大学提出通过分布式多GPU系统 [Ren et al., 2022] 对BA计算进行加速。随着机器学习的发展,BA与机器学习的结合被广泛研究。
视觉里程计Visual Odometry是SLAM中的重要部分,它估计两个时刻机器人的相对运动。 最近,随着机器学习的兴起,基于学习的VO框架也被提了出来。 TartanVO是第一个基于学习的视觉里程计(VO)模型,该模型可以推广到多个数据集和现实世界场景,并优于传统基于几何的方法。
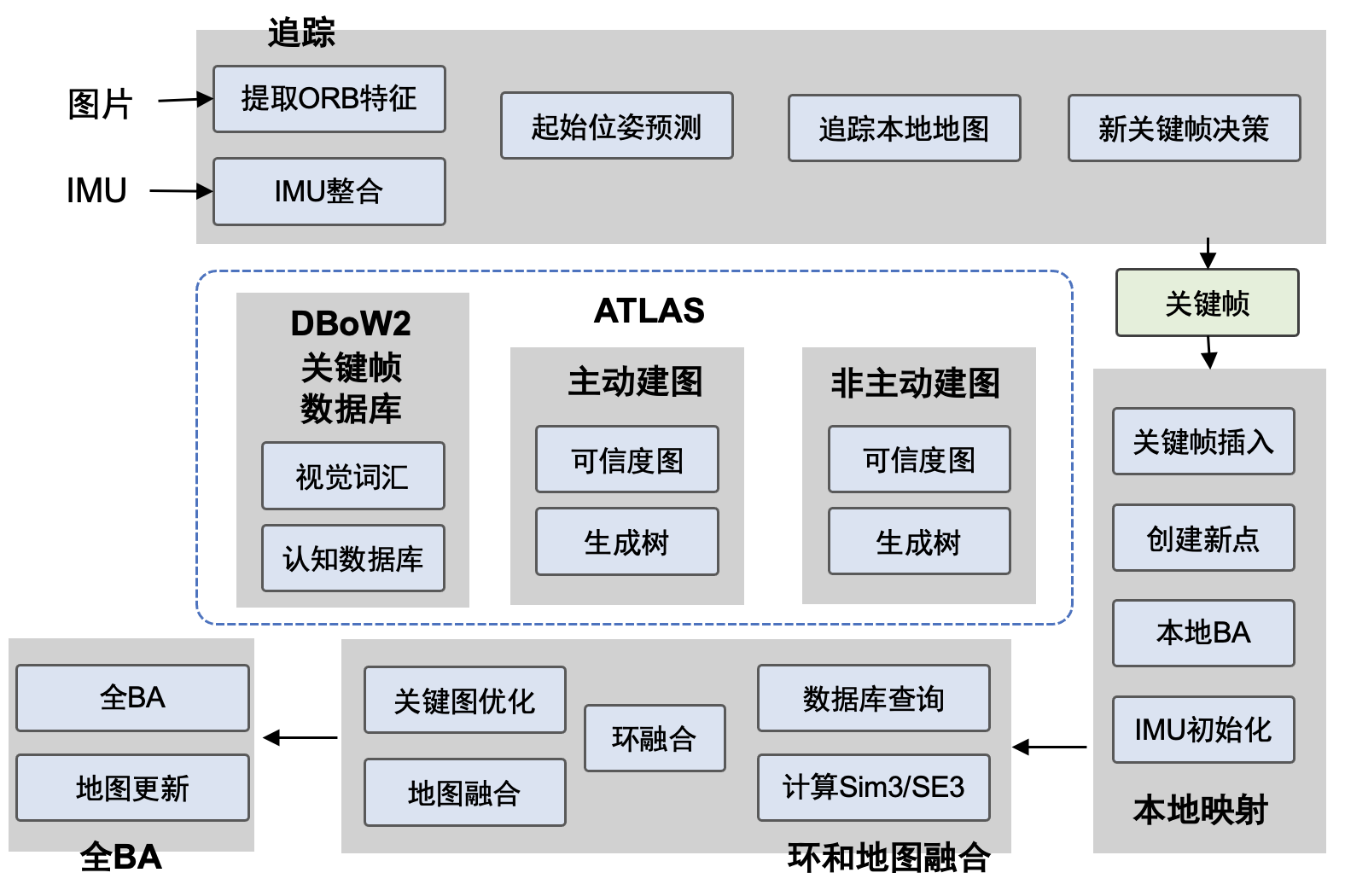
ORB-SLAM3主要系统组件 [Campos et al., 2021]¶