13.1. Overview of Robotic Systems¶
Robotics is an interdisciplinary subject that integrates computer science, mechanical engineering, electrical engineering, biomedical engineering, and mathematics. It covers the development of a wide range of machines, including autonomous vehicles, mechanical arms, unmanned aerial vehicles, and medical robots. Robots can perform one or more tasks autonomously or assist humans in specified tasks. A robotic system is generally composed of subsystems of perception, decision-making (planning), and control.
Based on the number of robots involved in a given system, robotic systems can be categorized into single-robot learning systems and multi-robot learning systems. An area worthy of research in terms of robotic systems is security and privacy issues, especially in scenarios where multiple robots collaborate and communicate with each other. Robot learning systems have recently been fully applied and developed in industry scenarios such as indoor navigation , autonomous driving in traffic scenarios , and mechanical arm operations. There are also a number of projects related to building robot learning infrastructure currently underway. One example is RoboBrain, a large-scale computing system that learns from publicly available Internet resources, computer simulations, and real-life robot trials. In autonomous driving, the impact of connected and autonomous vehicles (CAVs) on the traditional transportation industry has drawn wide attention to vehicle computing and stimulated research on how to perform complex computing tasks on computing platforms with limited computing power and surrounding CAVs. Simulators for autonomous driving systems, such as CARLA, MetaDrive , CarSim, and TruckSim, have been used to train and evaluate various autonomous driving algorithms. In addition, platforms for developing autonomous driving systems, such as ERDOS, Dynamic Deadline-Driven (D3), and Pylot, keep emerging to interconnect with model training and deployment systems.
Figure Fig. 13.1.1 depicts a typical framework of an autonomous driving system that adopts a modular design for perception, planning, and control. Green arrows represent the modular process of the autonomous driving system, the orange dashed arrow indicates that the planning and control systems are non-differentiable, and the blue dashed arrow indicates that the decision strategy can be trained through re-parameterization. We will introduce the perception, planning, and control systems in the following subsections.
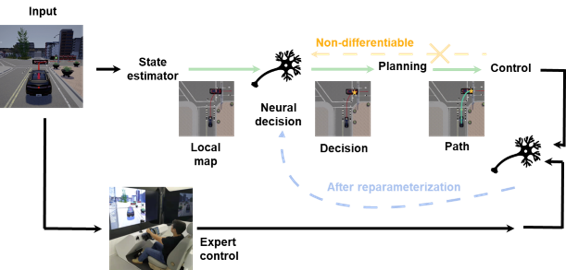
Fig. 13.1.1 Automatic driving framework based on imitation learning¶
13.1.1. Perception System¶
1. Object detection and semantic segmentation
Realizing autonomous movement and navigation of the robot, which depends on the perception system . As well as visual perception, a perception system also includes audio and tactile perception. In an unknown environment, a robot must know where it is (by means of camera re-location ) and what is around (by means of 3D object detection or semantic segmentation) to forecast the trajectory of a camera in space .
An example of a commonly used perception technology is image semantic segmentation, which has undergone several iterations over the years. The traditional 2D semantic segmentation is reaching maturity with little prospect of advancing much further. Because it uses 2D images, it has limitations in directly locating the spatial position of an object and its layout in space. This is why 3D information is essential. In order to make robots obtain 3D coordinates, semantics, and boundary information of objects in space based on only 2D images, cross-view semantic segmentation has become a hot research topic.
2. Simultaneous localization and mapping
A simultaneous localization and mapping (SLAM) system enables a robot to localize itself and know its surroundings in an unknown environment.
Figure :numref:ch17/ch17-orbslam3 shows the major system
components of ORB-SLAM3 — the latest version of ORB-SLAM. In this SLAM
system, processes include landmark extraction, data association, state
estimation and update, and landmark update. It localizes the positions
and orientations of a robot with map features (such as corners and
columns) that are repeatedly observed while the robot is moving, and
maps the environment according to incremental positions. In this way,
both localization and mapping are achieved at the same time. DROID-SLAM
is a deep visual SLAM system for monocular, stereo, and RGB-D cameras.
With recurrent iterative updates of camera pose and pixel depth through
a Bundle Adjustment (BA) layer, DROID-SLAM is highly robust and
substantially less likely to experience catastrophic failures. Despite
training on monocular video, it can leverage stereo or RGB-D video to
achieve improved performance at test time. BA describes a sum of errors
between pixel coordinates and reprojection coordinates — these
coordinates are usually computed by 3D coordinate points and camera
parameters. Due to the heavy and time-consuming workloads involved in BA
computing, the University of Edinburgh proposed using a distributed
multi-GPU system to accelerate BA computing. Along with the advancement
of machine learning, extensive research has been carried out with the
combination of BA and machine learning.
Visual odometry (VO) is a crucial part in SLAM. It is a process of estimating the relative motion of a robot at two timeslots. Recently, as machine learning continues to gain popularity, learning-based VO frameworks have been proposed. TartanVO, which outperforms traditional geometry-based methods, is the first learning-based VO model that can be generalized to multiple datasets and real-world scenarios.
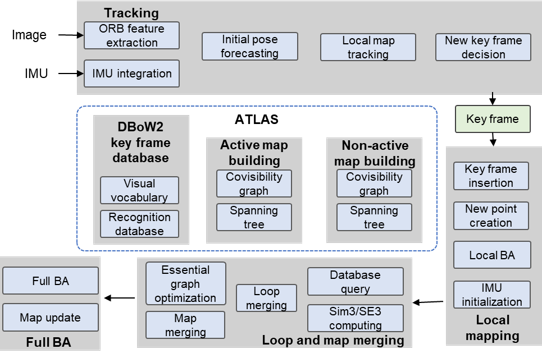
Fig. 13.1.2 Main system components ofORB-SLAM3¶
13.1.2. Planning System¶
Robotic planning includes motion and task planning . Motion planning, one of the core issues in robotics, aims to find a path for a robot between two given points under certain constraints with a guarantee of integrated and optimal probability, such as a collision-free path, the shortest path, or a path with minimum mechanical work. Although motion planning has wide applications, such as navigation and mechanical arm operation in complex environments, challenges still exist when it is used to deal with real-world robotic issues (in high-dimensional spaces). Researchers are developing new algorithms to overcome such challenges, for example, by optimizing computation and memory loads, improving planning representation, and better handling the curse of dimensionality.
At the same time, advances in machine learning have opened up a new perspective for robotics experts to study motion planning issues — a data-driven method — in order to address the bottlenecks of classical motion planners. Deep learning–based planners can use visual or semantic inputs for planning. ML4KP, a C++ library for kinodynamic motion planning, makes it easy to integrate machine learning methods into the planning process.
Reinforcement learning (RL) also has vital applications in planning
systems . Some recent work has performed multi-agent RL and driving
behavior analysis based on the MetaDrive simulator . To better
illustrate how RL is applied to autonomous driving, especially as a
planning module for autonomous driving,
Figure :numref:ch17/ch17-rl_ad shows the Partially Observable
Markov Decision Process (POMDP) model for autonomous driving based on
deep RL, covering important components such as the environment, reward,
and agent.
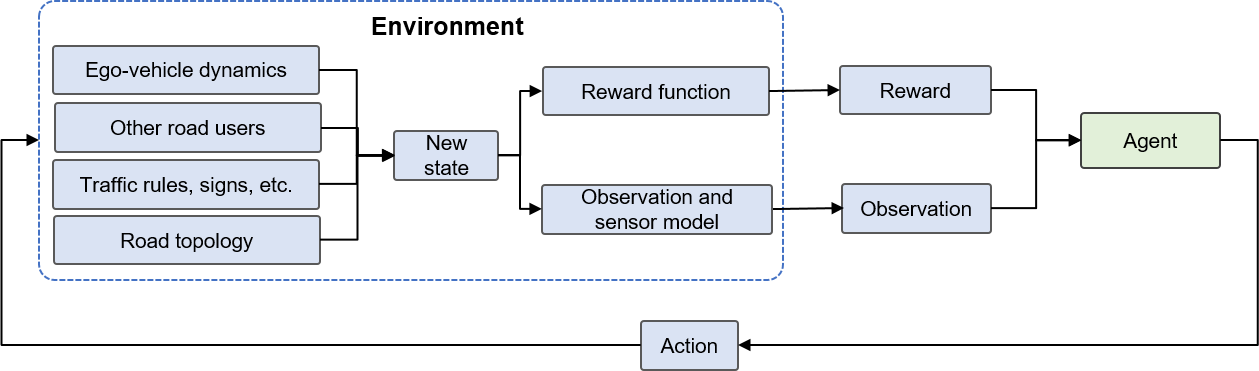
Fig. 13.1.3 POMDP model for deep RL–based autonomousdriving¶
13.1.3. Control System¶
Although control theory is firmly rooted in the model-based design philosophy, massive data and machine learning methods has brought new opportunities to use the theory. The intersection of control theory and machine learning has a wide range of research directions as well as their applications in various real-world systems.
1. Linear-quadratic control
Theoretically, linear-quadratic control is a classical control method. The linear-quadratic problem is one in which a set of linear differential equations can be used to represent a dynamical system and a quadratic function can be used to describe the constraint. The solution to such a problem is provided by the linear-quadratic regulator (LQR). Recent research on graph neural networks in distributed linear-quadratic control has transformed such problems into self-supervised learning problems, found the optimal distributed controllers based on graph neural networks, and derived sufficient conditions for the stability of the closed-loop systems.
2. Model predictive control
Model predictive control (MPC) is an advanced method for controlling a process while satisfying a set of constraints. The main advantage of MPC is allowing the current timeslot to be optimized while taking future timeslots in account — such an approach differs from an LQR. MPC can also forecast future events and take control actions accordingly. Some recent studies integrate optimal control and machine learning, and apply them to visual navigation tasks in unknown environments. For example, a learning-based perception module generates a series of waypoints for guiding a robot along a collision-free path to a target. Using these waypoints, a model-based planner generates a smooth and dynamically feasible trajectory that is then executed on the physical system by feedback control. Experiments show that the MPC system can reach the target position more reliably and efficiently than systems based on geometric mapping or end-to-end learning.
3. Stability analysis of control systems
Because safety is critical in robot applications, some RL methods learn
the uncertainty of dynamics in order to improve safety. Safe and robust
methods that can formally authenticate the learned control strategies
are encouraged. Figure :numref:ch17/ch17-safe_learning_control
shows the framework of a safe learning control system. Lyapunov
functions can effectively evaluate the stability of nonlinear dynamical
systems. Recently, neural Lyapunov has been proposed to take safety into
account.
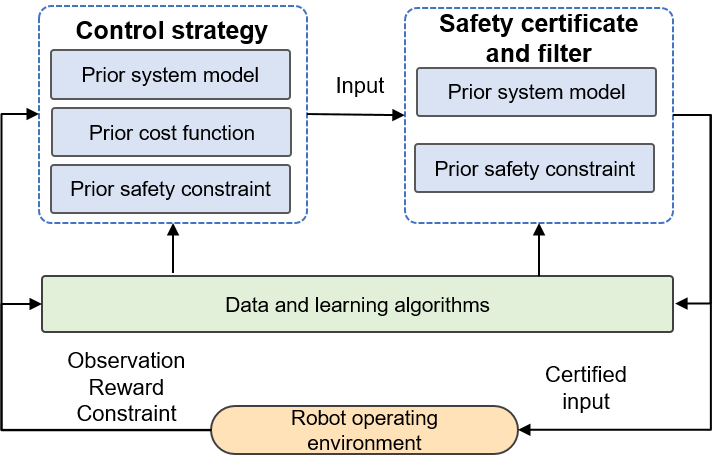
Fig. 13.1.4 Safe learning control system where data is used to update controlstrategies or safetyfilters¶
13.1.4. Robot Safety¶
Robotics and machine learning are cutting-edge research hotspots with a promising future. Using them together will open up even more fascinating opportunities and create far greater benefits than the incremental gains made in both fields independently. When we apply machine learning to robot projects, we often get too excited about using it to do many things that we once thought impossible. However, applying machine learning to robotics is not the same as using it directly. One important difference is that general machine learning systems have more of a direct impact in the virtual world, whereas machine learning systems for robots can easily have a direct influence on the physical world through robots. Consequently, in robot projects that integrate machine learning, we must always be cognizant of system safety and ensure that human safety (e.g., for developers and users) is reliably guaranteed throughout product development and after product launch. Safety is important in not only commercial projects but also personal projects — no one wants to cause injury or loss of life through negligence.
There are very real risks involved. Imagine the following situation in a commercial project: You are developing a mobile robot that will be used in a logistics warehouse for your company. It will operate alongside human workers and help them transfer goods for dispatch as needed. The robot has a vision-based human detection system to detect humans in the vicinity. If it encounters an obstacle while moving forward, the system helps determine the robot’s behavior: the robot will take a wider turn to avoid human obstacles or a narrower turn if the obstacle is not a human. Now assume that a worker is on a ladder sorting goods. If the system fails to detect that the obstacle ahead is a human, it will take a narrower turn to avoid the obstacle. In this case, the approaching robot might startle the worker, causing the worker to fall off the ladder in front of the robot. Any collision between the robot and the worker could be devastating, especially because the weight of the robot and the carried loads is hundreds of kilograms. If a collision did occur, the company as well as its owners would be held accountable (even legally accountable), and the potential commercial value of the robot could be ruined. More importantly, the injury to the worker and your guilt could seriously impact both parties.
In terms of personal projects, suppose you are developing a small mechanical arm to help you with simple desktop tasks, such as moving a cup or turning a switch on and off. The mechanical arm also relies on an object detection system to identify mission targets. On one occasion, while moving a cup, the mechanical arm fails to recognize a power strip in the planned path. The water in the cup splashes onto the power strip causing a short circuit. In the best case, you may only need to replace a power strip. But equally, a fire or electric shock may occur. Such accidents are not desirable.
Therefore, we must always pay attention to system safety when applying machine learning to any robot project.
1. Safety measures: Risk assessment and independent safety system
1) Risk assessment
To ensure the safety of robots and machine learning systems, we first need to identify the potential risks through risk assessment. There are many references online discussing how to conduct risk assessment. As such, we will not delve too deeply into this topic. The main point is that we should try to provide risk mitigation solutions for identified risks. More importantly, we should implement such solutions, as otherwise our efforts would be in vain.
2) Independent safety system
Once we have identified and understood what potential risks are involved, we can design an independent safety system to avoid those related to the robotic system. Specifically, the safety system works independently of the machine learning system, serves as the foundation of the robot framework, and operates with high or top priority. The safety system should cover not only the machine learning system but also all aspects of the robot. In other words, an independent and high-level safety system is necessary throughout the process of robot development rather than just for safeguarding the machine learning system. Take the mobile robot in the logistics warehouse we discussed earlier as an example. Assume that the robot’s wheels have an independent safety circuit with automatic brakes upon power-off. Also assume that the robot has a strictly standard laser radar to detect obstacles and likewise this radar has a safety circuit connected to that of the wheels. As such, if the laser radar detects any object (e.g., a person directly in front of the robot or suddenly intruding on the path), the independent safety circuit powers off and applies the brakes to prevent collision. Such a safety system is completely free from any control logic or higher-level systems, freeing developers from worrying about unexpected consequences of adopting groundbreaking technologies.
2. Ethical issues of machine learning systems
In addition to the most fundamental issue of safety discussed in the previous sections, the ethics of machine learning systems can also affect the use of robots.
Ethnicity imbalance in training datasets is a classical issue. Let’s use the previous example again here. If our training dataset includes images of only Asian people but we want to explore markets outside Asia, users are likely to find that our robots cannot recognize their workers effectively. Although the independent safety system can avoid accidents, performing emergency stops in front of workers would result in a bad user experience. In addition, sales of our robots would be impeded in markets outside Asia.
The ethical issue of machine learning systems is currently a hotly debated topic. As industry stakeholders, we need to be aware of the latest progress in this direction. While we take these issues into account at the initial stage of system design, we also hope that our products are beneficial to more people rather than being a hinderance.