13.2. Robot Operating System¶
This section provides an overview of the Robot Operating System (ROS), which emerged as a result of a robot project at the Stanford Artificial Intelligence Laboratory. It is a free, open-source framework that provides interfaces and tools to help build advanced robots. Due to the rapid development and increasing complexity of robotics, demand for code reuse and modular design continues to rise. ROS is suitable for robots and other complex scenarios with multiple nodes and tasks. It has been used as a development platform for some robots, unmanned aerial vehicles (UAVs), and even unmanned ground vehicles (UGVs). In robot learning, ROS/ROS 2 can be combined with deep learning. Deep learning nodes have been developed for ROS/ROS 2 and support Nvidia Jetson and TensorRT. Nvidia Jetson, developed by Nvidia for autonomous machines, is an embedded system on module (SOM) that includes the central processing unit (CPU), graphics processing unit (GPU), power management integrated circuit (PMIC), dynamic random access memory (DRAM), and flash memory, increasing the operating speed of autonomous machine software. TensorRT is a machine learning framework released by Nvidia to run machine learning inference on its hardware.
As a framework for robot programming, ROS couples loosely connected components and provides them with a communication framework. Though called an operating system, ROS is more like a middleware suite that bridges the communication between various ROS-based applications and enables robots to organize and run perception, decision-making, and control algorithms. ROS adopts a distributed design and supports multiple programming languages such as C++ and Python, making it possible to port code. Its minimum process unit is node, and nodes are managed by node masters. The parameter settings defined for ROS are stored on the parameter server. ROS communication is achieved via topic, service, parameter server, and actionlib.
ROS provides a number of built-in tools. For example, rviz is a 3D
visualizer used to visualize robots, their working environments, and
sensor data. It is a highly configurable tool with many different types
of plugins for visualization. The build system adopted in ROS is catkin,
which is similar to CMake in Linux. A catkin workspace is a directory
for creating, modifying, and compiling catkin software packages.
roslaunch is a tool used to start multiple ROS nodes locally and
remotely and to set parameters on the ROS parameter server. There is
also a robot simulation tool named Gazebo and a mobile operations
software and planning framework called MoveIt. ROS provides robot
developers with interfaces to different programming languages, such as
roscpp for C++ and rospy for Python. The Unified Robotic
Description Format (URDF) is an XML file format used in ROS to describe
robot files. In terms of limitations, ROS performs poorly in real-time
communication and system stability required in industrial scenarios.
The ROS 2 project was announced at ROSCon 2014. Ardent Apalone — the
first non-beta release of ROS 2 — was released in 2017. ROS 2 adds
support for multi-robot systems, improving network performance for
communication among robots. It also supports embedded microcontrollers,
such as MCUs, and can run on systems including Linux x86, Linux ARM,
Windows, macOS, and RTOS. More importantly, the real-time control
support in ROS 2 improves the timeliness of control and overall robot
performance. The communication system of ROS 2 is based on the data
distribution service (DDS), as shown in
Figure :numref:ch17/ch17-ROS2_arch.
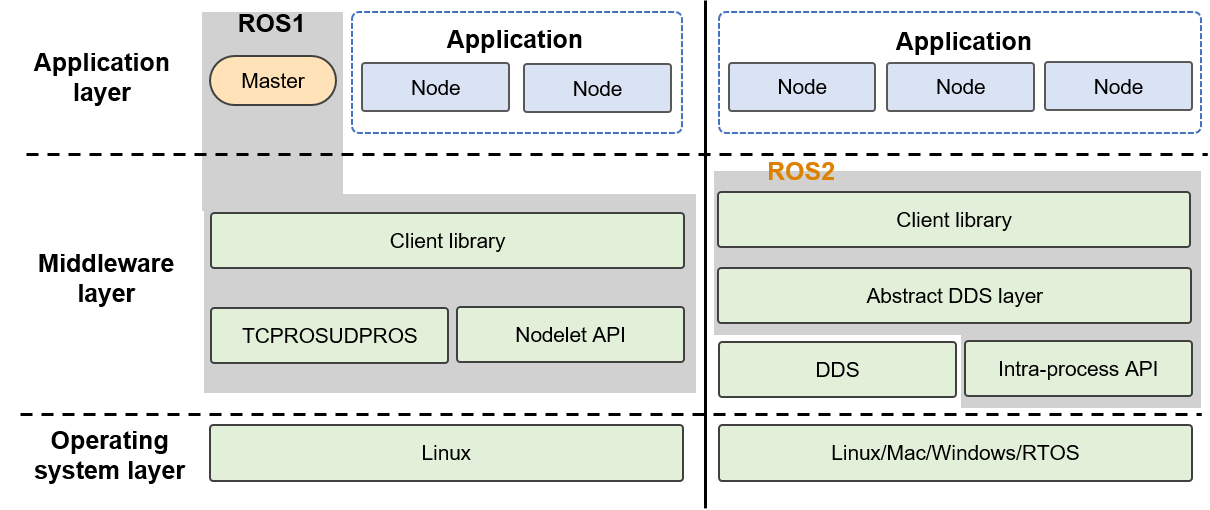
Fig. 13.2.1 Overview of ROS/ROS 2architecture¶
ROS 2 relies on combining workspaces using the shell environment. Workspace is a ROS term that specifies the location of the system developed by using ROS 2. The core ROS 2 workspace is called the underlay, and other workspaces are called overlays. When developing with ROS 2, we typically have several workspaces that are active at the same time. In the following subsections, we will introduce the core concepts of ROS 2 with reference to the official ROS 2 Documentation 1. The ROS graph is a network of ROS 2 elements that process data at the same time. It encompasses all executables and the connections between them.
13.2.1. ROS 2 Nodes¶
ROS 2 decomposes a complex system into many modular nodes. Each node in
ROS 2 fulfills a single, modular purpose (e.g., one node for controlling
wheel motors, and another node for controlling a laser range-finder).
Each node can send data to and receive data from other nodes via topics,
services, actions, or parameters. A complete robotic system is comprised
of many nodes working in concert. In ROS 2, a single executable (C++
program, Python program, etc.) can contain one or more nodes, as shown
in Figure :numref:ch17/ch17-ROS2_graph. The middleware at the
bottom layer of ROS 2 enables nodes to discover each other. The process
is summarized as follows:
When a node is started, it broadcasts its online state to other nodes with the same ROS domain name. Other nodes send back their own information after receiving the broadcast. In this way, the connection between nodes is established for node communication.
Each node periodically broadcasts its information so that it can connect to nodes that come online even if the initial discovery process is missed.
Before a node goes offline, it also broadcasts the offline information to other nodes.
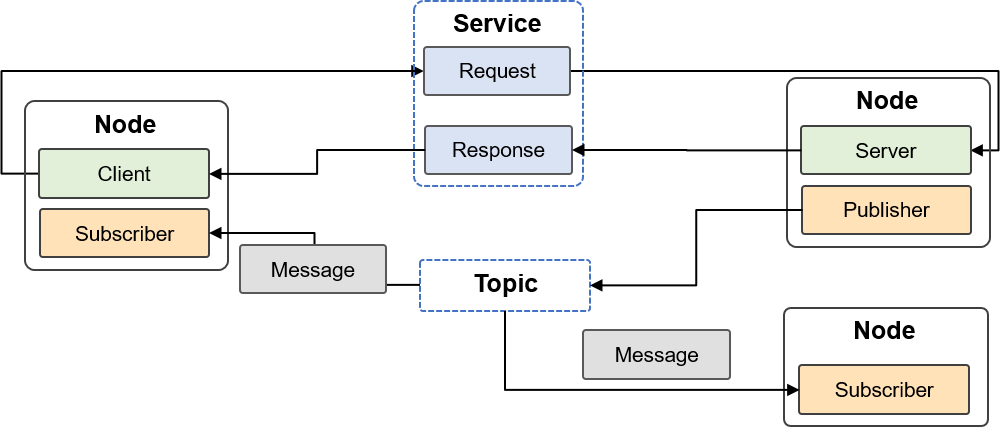
Fig. 13.2.2 Robotic system consisting of many nodes working inconcert¶
13.2.2. ROS 2 Topics¶
Topics are vital elements in the ROS graph and act as the buses for
nodes to exchange messages. Topics are one of the main ways in which
data moves between nodes and therefore between different parts of the
system. As shown in Figure :numref:ch17/ch17-ROS2_topics, a node
can publish data and subscribe to any number of topics simultaneously.
rqt is a software framework of ROS and implements various GUI tools in the form of plugins. We can run all existing GUI tools as dockable windows within rqt. Although we can run such tools in a traditional standalone manner, rqt makes it easier to manage the various types of windows on the screen simultaneously.
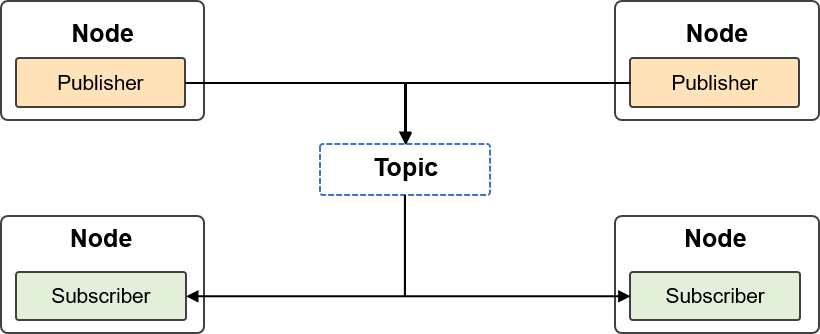
Fig. 13.2.3 A node can publish data and subscribe to any number of topicssimultaneously.¶
13.2.3. ROS 2 Services¶
Services are another method of communication for nodes in the ROS graph
and are used in ROS 2. Unlike a topic, which is based on a
publisher-subscriber model (a node publishes information that can be
consumed by one or more subscribers), services are based on a
request-and-response model. While topics allow nodes to subscribe to
data streams and receive continual updates, services provide data only
when they are specifically requested by a client. In the
request-and-response model, a client initiates a request to a node
providing a desired service and the service processes the request and
generates a response, as shown in
Figure :numref:ch17/ch17-ROS2_services.
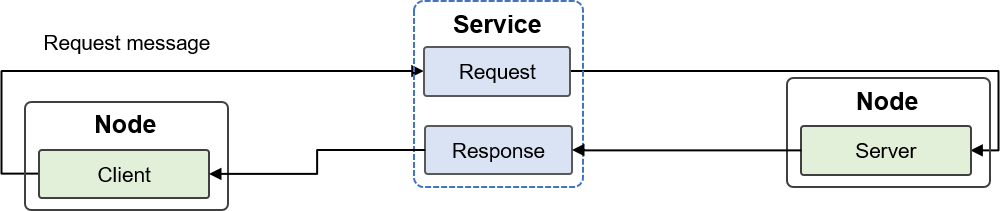
Fig. 13.2.4 ROS 2service¶
13.2.4. ROS 2 Parameters¶
Parameters are the configuration values of nodes, and can be regarded as node settings. Nodes can store parameters as integers, floating-point numbers, Boolean values, strings, and lists. In ROS 2, each node maintains its own parameters.
13.2.5. ROS 2 Actions¶
Actions are one of the communication types in ROS 2 and are applicable
to long-running tasks. Figure :numref:ch17/ch17-ROS2_actions shows
the three parts involved in an action: a goal, feedback, and a result.
Actions are built on topics and services, and function in a similar way
to services with the exception that actions can be canceled. Unlike
services, which return a single response, actions provide stable
feedback. Actions use a client-server model, which is similar to the
publisher-subscriber model. An “action client” node sends a goal to an
“action server” node, which acknowledges the goal and returns a stream
of feedback and a result. Robotic systems are likely to use actions for
navigation. For example, an action goal can tell a robot to head for a
position. The robot can send updates (i.e., feedback) while it navigates
a path to the position, and then send a result message when it arrives
at its destination.
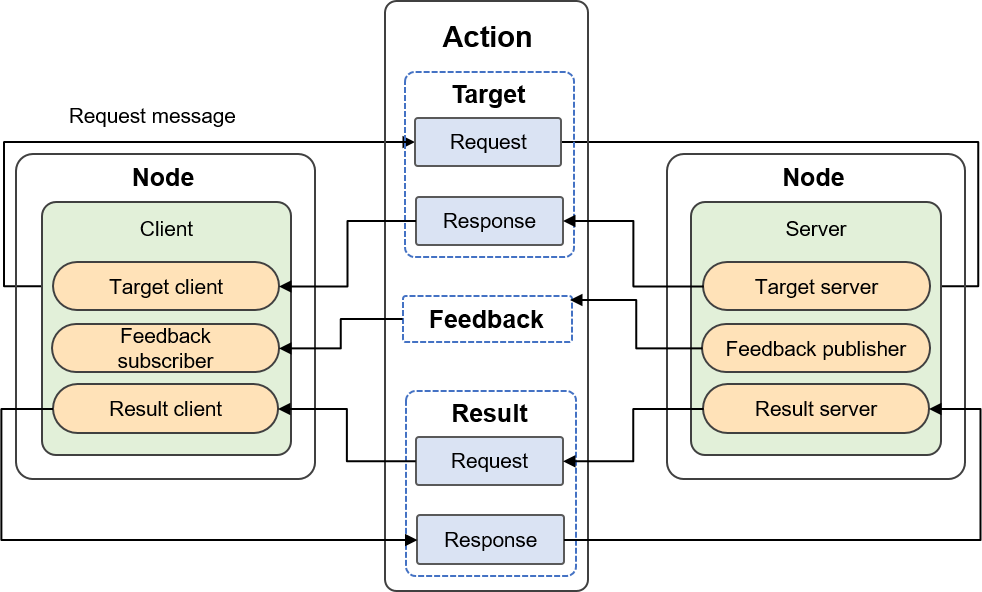
Fig. 13.2.5 ROS 2 action¶